1: 操作基礎反復訓練/Basic Controls Drill
Quadroter操縦の高度化に必要な 操作基礎反復訓練/Basic Controls Drill を
飛行時間を目安にした3つの段階/初期20時間+中期50時間+後期100時間 に分け
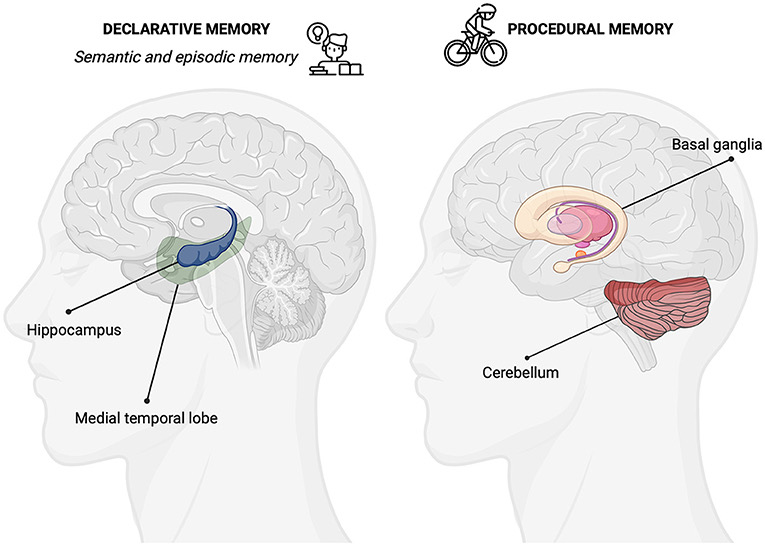
Procedural Memory/手続き記憶 と Step by Step Memory/手順記憶 を
明確に対比させながら体系的に組み立てたプログラムを作成しました
段階別訓練体系
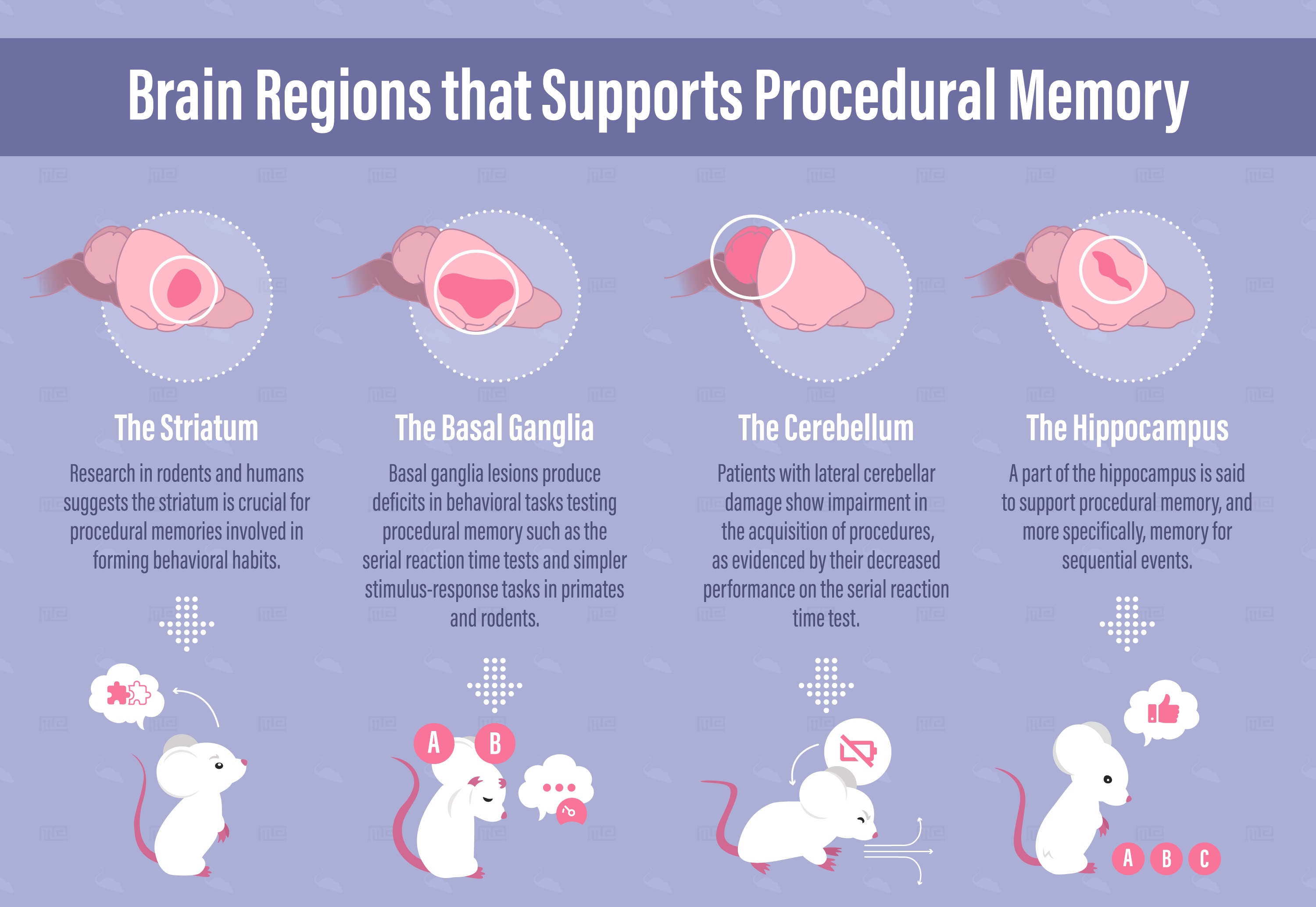
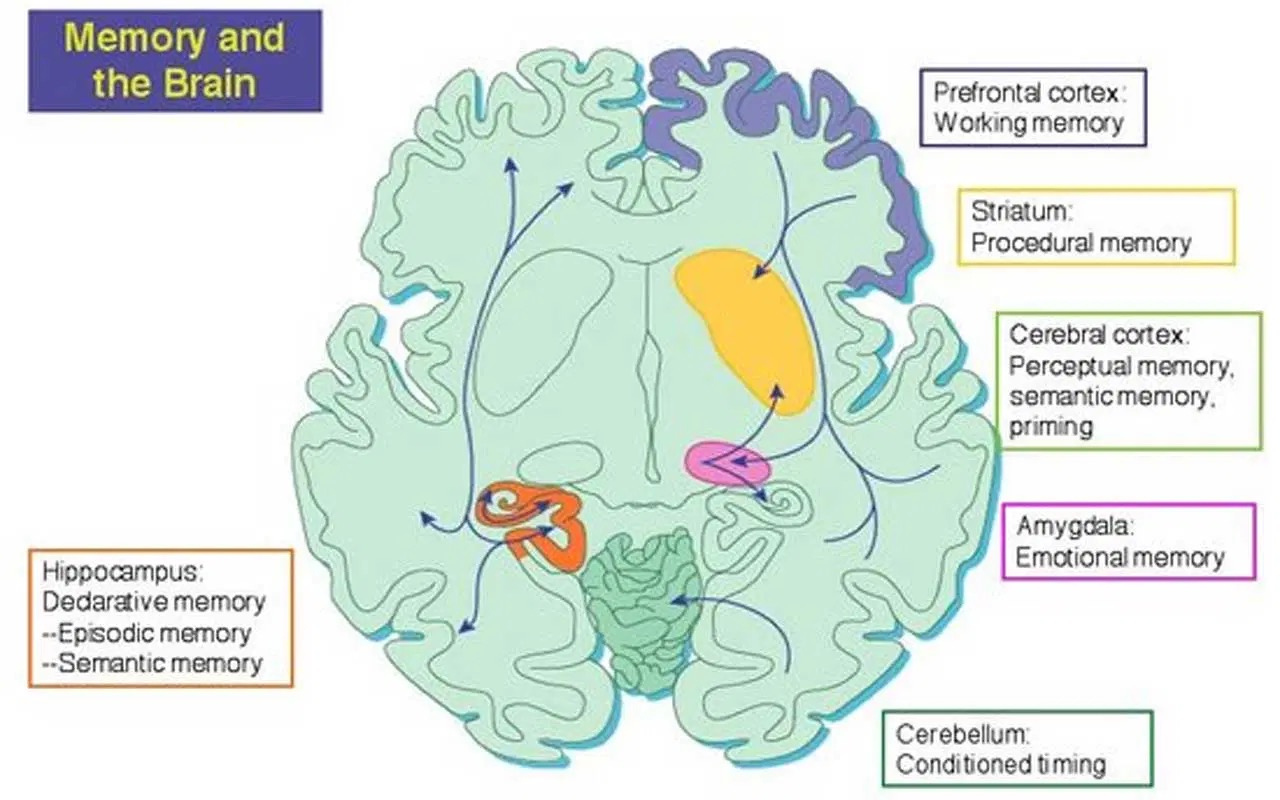
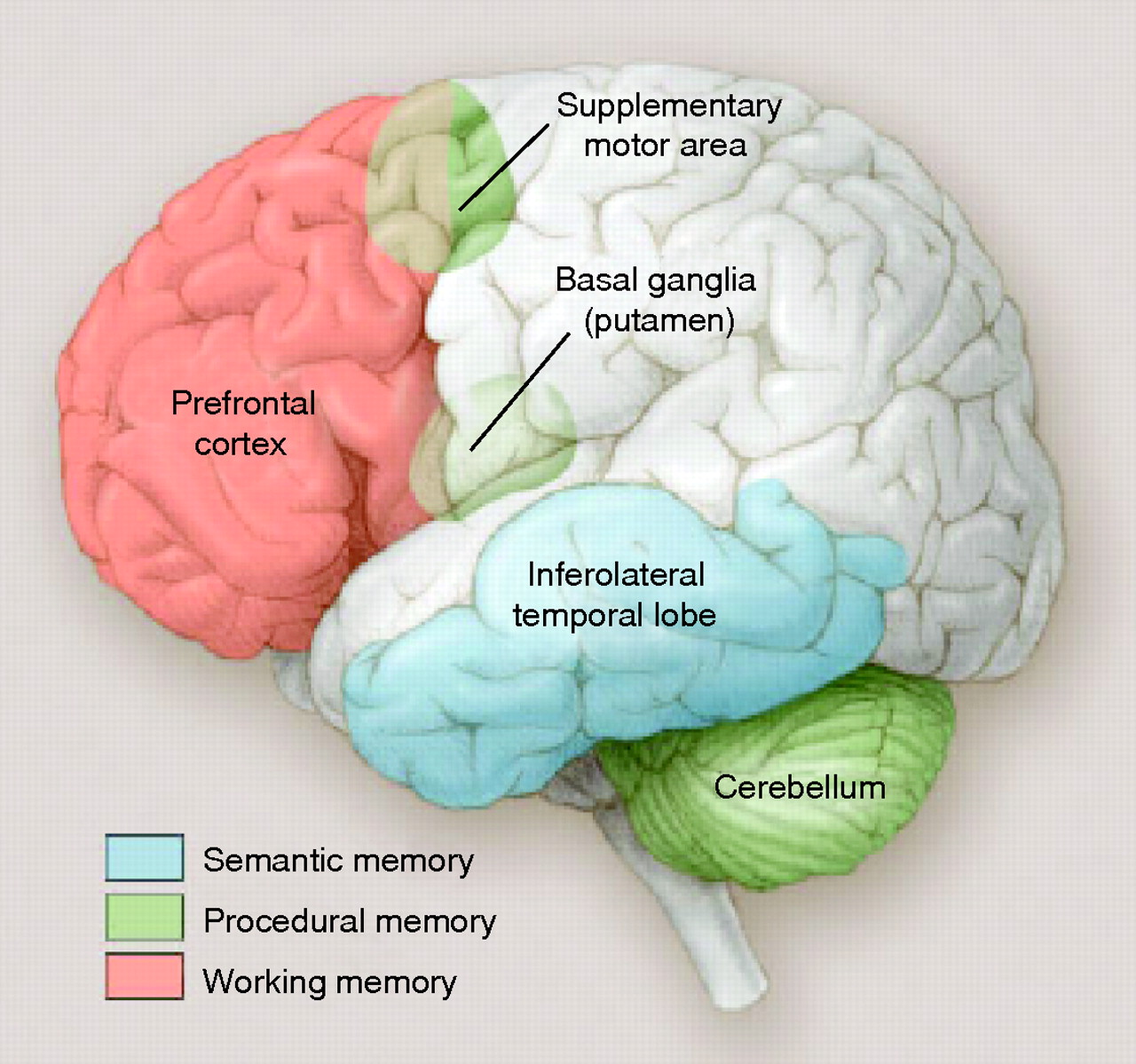
操縦スキルは記憶形式を通して 習得/高度化 されます
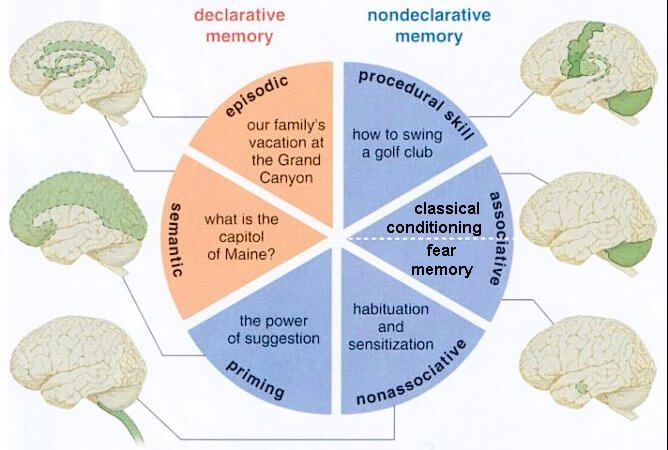
記憶タイプ
| 記憶タイプ | 特徵 |
|---|---|
| 手続き記憶(Procedural Memory ) | 無意識的な運動記憶 反復訓練により形成され、意識的なコントロールを伴わずに操作が可能 |
| 手順記憶 (Step by Step Memory) | 意識的に手順やルールを記憶し その順序を明確に辿ることで操作を行う記憶 |
操縦技能の高度化に伴い 意識的な Step by Step Memory/手順記憶 が
無意識的な Procedural Memory/手続き記憶 へと段階的に置き換わります
1-1: 初期段階/飛行時間 約20時間
訓練の目標:
Step by Step Memory/手順記憶 の確立/操作 を意識的に実行できる段階
各操作の基本パターンを繰り返し 意識的な認識を強化する
訓練内容:
1-1-1: Step by Step Memory/手順記憶 を中心にしたホバリング訓練
Step by Step:
機体を地面に水平にセット
ゆっくり Throttle を上げ 高さ1mで停止
Elevator と Aileron を同時に2次元x2=4次元の操作で微調整し 位置安定を確認
10秒間安定させてから ゆっくり Throttle で下げて着陸/Decent
このプロセスを Step by Step Memory/手順記憶 として意識的に何度も繰り返す
1-1-2: 直線+四角形 飛行の明確な手順化
Step by Step:
上昇→前進→一時停止→旋回→直進
各動作を区切って意識的に操作を確認しながら反復
記憶タイプの対比分析:
| 手順記憶(意識的) | 手続き記憶(無意識的) |
|---|---|
| 明確な順序を意識 | ほぼ形成されていない |
| 操作の都度意識的な確認が必要 | 無意識化のための基礎形成段階 |
1-2: 中期段階/飛行時間 約50時間
訓練の目標:
Step by Step Memory/手順記憶 を徐々に Procedural Memory/手続き記憶 へ転換
操作プロセスを 半意識的 に行える状態を形成する
訓練内容:
1-2-1: 位置保持ホバリング+外乱対応
訓練プロセスを徐々に無意識的に行うため 手順を段階的に削減
外乱/軽風 への対応を意識的に行い 反応を自動化する
1-2-2: 複合飛行パターン/8の字や円形飛行
最初は Step by Step Memory/手順記憶 で順序を確認
徐々に速度を上げて反復し 無意識で動作連携が可能になるまで繰り返す
記憶タイプの対比分析:
| 手順記憶(意識的) | 手続き記憶(無意識的) |
|---|---|
| 部分的に手順を意識する程度 | 徐々に形成され始める |
| 難しい場面のみ手順を再確認 | 一般的な操作は半自動化 |
1-3: 後期段階/飛行時間 約100時間
訓練の目標:
Step by Step Memory/手順記憶 の最小化
操作はほぼ完全に Procedural Memory/手続き記憶 として自動化される
操縦者は操作そのものより 戦術的判断や外部環境認識に意識を集中可能
訓練内容:
1-3-1: 高度な定点精密ホバリング/狭い空間+乱流中
手順はほぼ意識せず 無意識で機体を制御
外乱環境下でも自然に反射的に安定させる
1-3-2: 複雑な飛行/FPV高速ゲート通過+急旋回+高度変化
最初の手順確認/Step by Step は最小限に留め 直感的に操縦
無意識の運動感覚を活用し 自然に一連の操縦動作を実現
1-3-3: 異常事態/緊急時の即応訓練
緊急時の手順を初め意識的に覚えさせ 反復を重ねることで
迅速な無意識的反応Procedural Memory/手続き記憶 へ変換
1-4: 記憶タイプの対比分析
| 手順記憶(意識的) | 手続き記憶(無意識的) |
|---|---|
| 特殊状況以外はほぼ不要 | 大部分が自動化されている |
| ごく稀な異常時のみ手順を再想起 | 操縦の大半を直感的に実行 |
1-5: 操作基礎反復訓練/Basic Controls Drill: 総合分析と訓練体系の要約
| 段階 | 操縦累積時間 | 手順記憶 vs 手続き記憶の関係 | 操縦の特徴 |
|---|---|---|---|
| 初期段階 | ~ 20h | 手順記憶主導型(意識的) | 意識的に順序を追って操作 |
| 中期段階 | ~ 50h | 手順→手続き記憶への移行期 | 半意識的な動作でスムーズな操作が可能 |
| 後期段階 | ~ 100h | 手続き記憶主導型(無意識的) | 操作を直感的・無意識的に自動化 |
操作基礎反復訓練/Basic Controls Drill/最終的に目指す操縦技能
Procedural Memory/手続き記憶 の完全な形成により 操作にかかる認知負荷を 極限まで低減し
外部状況や戦術的判断などの高次の認知タスクにリソースを割り当てることが可能になります
その結果 高度かつ安全な操縦を実現し 複雑な状況下でも安定したパフォーマンスを発揮できるようになります
正確かつ精密なホバリングにより 微細な姿勢制御感覚を体得し 動的安定性の知覚精度を高める
飛行経路反復により 脳内に操縦操作と空間的位置感覚が自動的に結びついた 筋記憶 を形成する
特定の動作を繰り返すことで 筋肉細胞内の核の数が増加します
これにより微妙な操作をするための様々な筋肉の筋肉量が増加します
体系的な訓練構成を通じて 効率的かつ安全に Quadroter操縦スキルを高度化し
操縦者の能力を最大限に引き出すことが可能となります
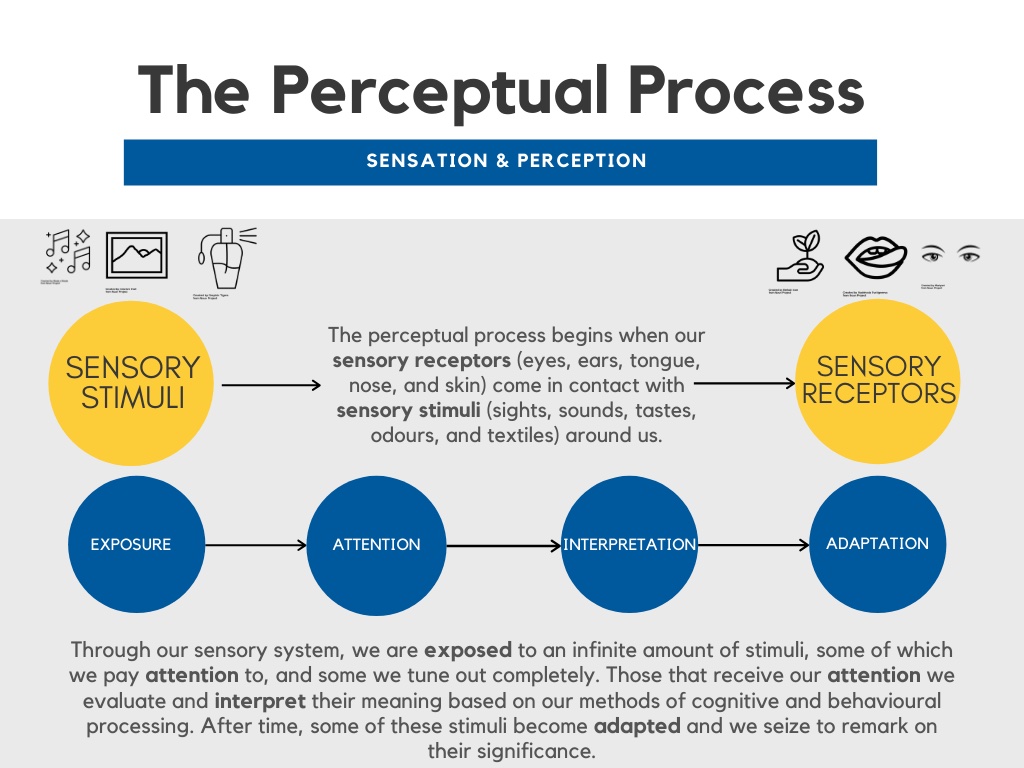
2: FPV視覚運動協調訓練/Visual-Motor Coordination Training Motor=運動筋肉
訓練の目標: FPV/First Person View(一人称視点)の視覚情報と実際の操縦動作を正確に同期化し 視覚運動統合能力を 自動化/高度化 する 目的と分析: 手順記憶的アプローチ/Step by Step 初期段階では FPV映像を見て→状況認識→機体操作 Elevator/Aileron/Rudder/Throttle を明示的に順序立てる 操作と視覚認識の関係を明確化し 意識的に視覚→操作の順序を守る Procedural Memory/手続き記憶的アプローチ 繰り返しの訓練で視覚入力と操作出力を自動的にリンク FPV映像を見た瞬間に操作動作が即座に無意識的に発動するレベルに到達 操縦者は個別の操作を意識せず 戦術判断など高次認知に集中可能 分析的考察: FPV訓練での視覚と運動の協調は神経回路レベルでの高速処理を求めるため Procedural Memory/手続き記憶 の形成が極めて有効 反復回数が多いほど効果的に自動化が進む
3: 異常事態対応反射訓練/Emergency Reflex Training
訓練の目標:
緊急時や予期せぬ異常状況に対する反応速度を最大化し 迅速で適切な無意識的対応能力を形成する
目的と分析:
手順記憶的アプローチ/Step by Step
異常発生時の正しい操作手順/例: 姿勢異常→Throttle を戻す→Elevator/Aileron の補正→ホバリング安定 を明示的に意識的訓練で定着させる
初期の段階では 異常事態への対応をマニュアル的に意識的に実施
手続き記憶的アプローチ/Procedural
繰り返し異常事態を経験させることで 反応を無意識レベルまで自動化
操縦者は思考を介さずに即座に正しい対応を行えるレベルに到達
分析的考察:
緊急事態での即応性には手続き記憶が最適であり
反射的対応の自動化が事故防止や機体の安全性を高める決定的な要素となる
意識的手順は混乱時に遅延を生むため 迅速な手続き記憶形成が重要
4: 複合運動統合訓練/Complex Manoeuvre Integration
訓練の目標:
複数の異なる運動パターン/旋回+上昇下降+急旋回など を統合し
高度で複雑な操縦動作を無意識的に実行できるようにする
目的と分析:
手順記憶的アプローチ/Step by Step
最初は各動作 Elevator/Aileron/Rudder/Throttle を独立したステップとして明確に意識
一連の動作を順序付け 意識的に操作を組み立てる
手続き記憶的アプローチ/Procedural
一連の動作を反復し 動作の境界を徐々になくして一体化
各動作の連結部を無意識的な反射レベルに昇華し 複雑な連携動作を迅速かつ滑らかに実施
分析的考察:
複雑な操縦において手順記憶のみで操作を続けると動作間に遅延が生じるため 高速化/精度向上 には手続き記憶の獲得が必須
繰り返しによる自動化で高次操作技能を安定化させることが最終目標
5: シミュレータベース反復訓練/Simulator-Based Repetition Training
訓練の目標:
シミュレーターを活用して反復回数を増やし 安全かつ効率的に操縦動作を Procedural Memory/手続き記憶 として自動化する
目的と分析:
手順記憶的アプローチ/Step by Step
シミュレータを用いて各操縦操作の順序を意識的に訓練
操作プロセスを明確化して覚える段階/例: 上昇→前進→旋回→着陸
手続き記憶的アプローチ/Procedural
シミュレータ上で繰り返し反復操作を行い 運動感覚を脳内に深く定着
反復の量的効果で 現実環境でも即座に無意識操作が可能なレベルに到達
分析的考察:
シミュレータでの反復訓練は コスト/安全性/効率性 に優れ Procedural Memory/手続き記憶 の形成を非常に効率的に行うことができる
操作回数を重ねることで現実の操縦での認知負荷を劇的に軽減することが可能になる
総合的分析とまとめ:
| 項目 | 手順記憶(Step by Step)の役割 | 手続き記憶(Procedural)の役割 | 最終的な効果 |
|---|---|---|---|
| 異常事態対応反射 | 異常時の基本操作明示化 | 異常時反応の自動反射化 | 緊急時対応速度と正確性を極大化 |
| 複合運動統合 | 操作動作の明確な順序記憶 | 複雑操作の自動統合化 | 複雑な操縦動作の滑らかで高速な実施 |
| シミュレータ訓練 | 安全な環境での基本操作確認 | 操作動作の徹底的な自動化 | 現実環境での認知負荷低減・操縦精度向上 |
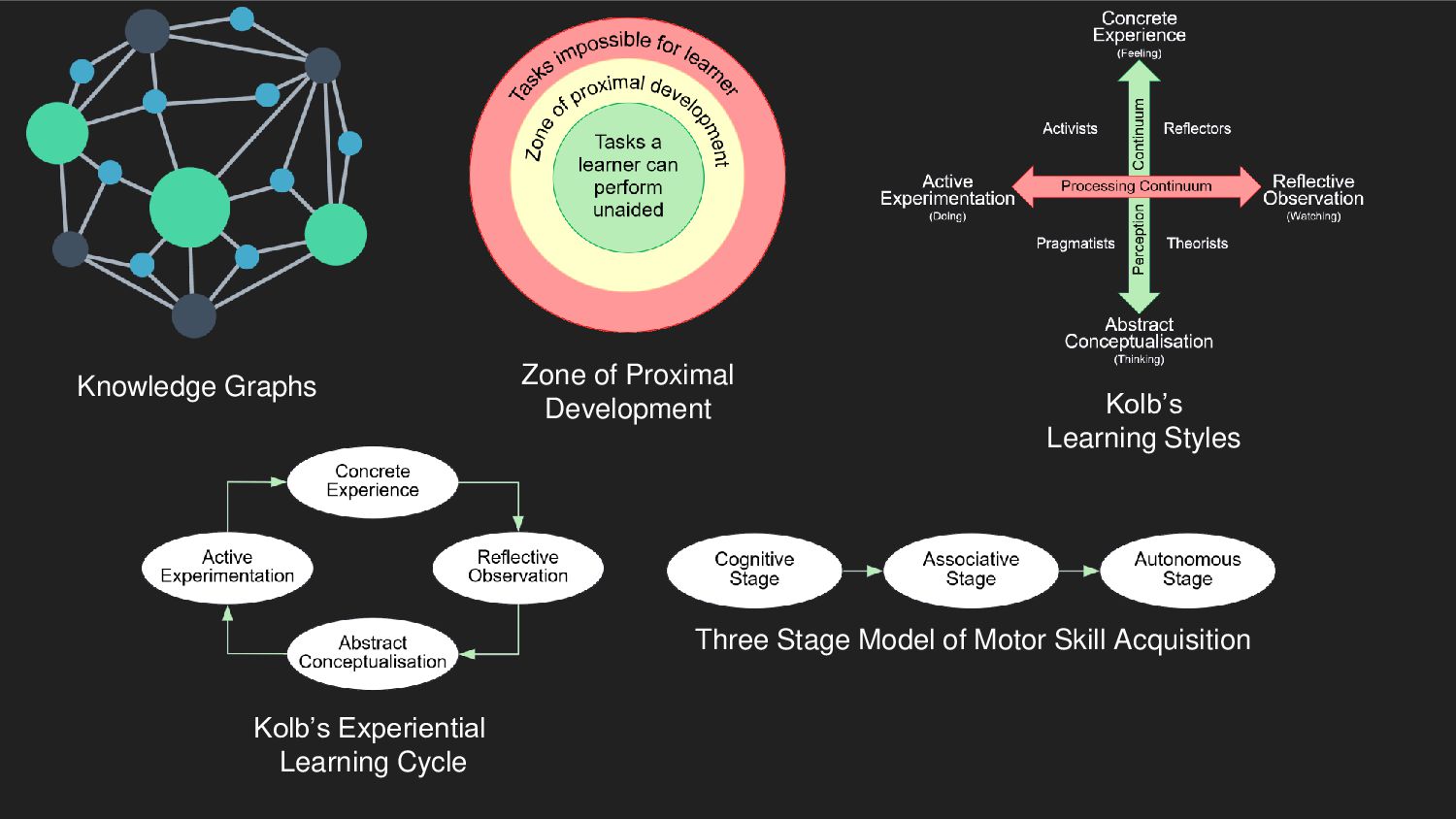
運動スキルの獲得段階理論/Three-Stage Model of Motor Skill Acquisition/Fitts & Posne/1967 によると
認知段階→連合段階→自動化段階のステップを経て Procedural Memory/手続き記憶 が形成されます
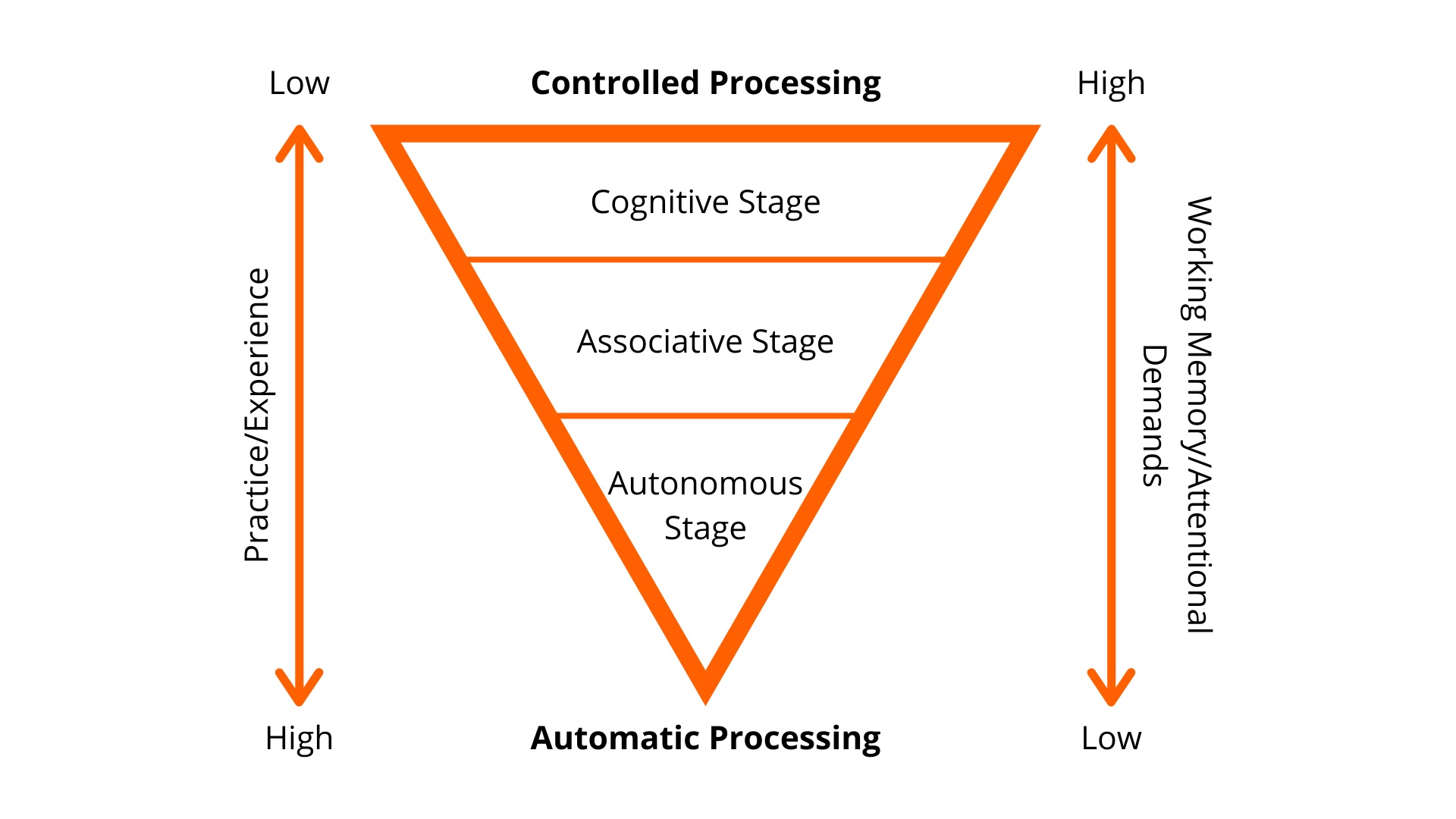
本訓練プログラムはこの段階を効率的に推移させるよう設計しました
| 段階 | 特徴 | 操縦者の認知レベル | 具体的な行動の例 |
|---|---|---|---|
| 1. 認知段階(Cognitive Stage) | 操作方法を意識的に理解し 強い意識的制度のもとで実行 | 極めて意識的 | 操作方法をマニュアルで確認 |
| 2. 連合段階(Associative Stage) | 反復によって徐々に動作がなめらかに統合される段階 | 半意識的 | 操作の誤差修正 微調整 |
| 3. 自動化段階(Autonomos Stage) | 意識的な注意を要せず 無意識的に操作が実行可能 | 無意識的 | 操作が自然に自動化される |
第1段階: Cognitive Stage/認知段階
概要:
操縦者が新しい運動スキルを初めて学習する段階であり 各操作動作や方法を明確に理解する必要がある
認知特性:
意識的な努力を伴う
操作がぎこちない
操作方法を明示的に頭の中で考える
操縦訓練例:
ドローンの操作マニュアルを読み
Throttle/スロットル を上げれば上昇
Rudde で方向転換
などを明確に頭で理解
実際に操縦しながら
スロットルを少しずつ上げて1m/2mで止める
などの行動を意識的に確認
Elevator を前に傾ければ前進する
と操作を言語的に再確認しながらゆっくり飛行
第2段階: Associative Stage/連合段階
概要:
スキルが徐々に 安定化/統合化 され 運動の効率性が向上し始める段階
認知特性:
操作が滑らかになり始める
操作中に誤差を検知し 微調整可能になる
操作方法を繰り返し調整して最適化
操縦訓練例:
一定の高度でホバリングを繰り返すと 徐々に自分の操作の誤差を感じ取り
微調整することが可能になる
FPV/First Person View(一人称視点)で障害物の間を通過する時
最初はミスもあるが 徐々に狙った経路通り飛べるようになる
ドローンが Drift/横流れ/ドリフト した際に即座に修正操作を意識的に行い
姿勢を安定させることができるようになる
第3段階: Autonomous Stage/自動化段階
概要:
操作が完全に自動化され 意識的注意がほぼ不要になる段階
複雑な操作も自然にこなせる
認知特性:
操作は 無意識的/自動的 になる
他のタスクに意識を集中させる余裕が生まれる
操作速度が速くなり 動作精度も高くなる
操縦訓練例:
障害物を高速で通過する際 操作を意識せずとも指が自然に反応して正確な動作を実行する
FPV/First Person View(一人称視点)の中で急な方向転換や複雑な機動を瞬時に無意識的に行える
異常状況/強風+機体の乱れ に瞬時に反射的に対応し 機体の安定を自然に維持できる
Quadroter Piloting の高度化には 段階的/反復的 な訓練により Procedural Memory/手続き記憶 を形成することが不可欠です
これにより 操縦者の認知負荷が軽減され 高度で精密な動作を無意識的に遂行できる 運動プログラム が脳内に構築されます
特にFPV Racing など高度な Piloting 領域では これら訓練を体系的に行うことで パイロットのパフォーマンスは劇的に向上します