テクニカルターム/専門用語は
特別な活動やグループの技術用語 または特徴的な慣用句です
ジャンル内で特定の意味を持たせ/定義した用語で
これによりコミュニケーションの効率性や精度を 高めることができます
Technical Terms of Drone
テクニカルターム
Rr
Radio Control/RC
ラジオコントロール
ラジオコントロール/無線操縦は 無線により遠隔操作するシステム またはその遠隔方式のことを言う
.. .. Under Construction .. ..
RC Flight Simulator
An RC flight simulator is a computer program that allows pilots of radio-controlled aircraft to practice on a computer, without the risk and expense of damaging a real model.
Besides the obvious use of training beginners, they are also used for practising new aerobatics, evaluating a model before buying it, and to allow flight practice when conditions are otherwise unsuitable. Most simulators allow the use of real R/C transmitters to control the sim.
There are a number of commercial packages available, such as Eiperle CGM's neXt - RC Flight Simulator, SVK Systems' ClearView, Knife Edge Software's RealFlight, IPACS' AeroFly and Trasna Technology's AccuRC.
There are also a number of free simulators, with FS One being the most well known and most feature rich.
Most simulators allow the importing of add-ons such as new models and landscapes. There are many web sites dedicated to offering free content like this.
Some of these simulators are dedicated to R/C flight, while others are generic simulators that can simulate both full-scale and R/C flight.
RSSI/Received Signal Strength Indicator
受信した電波の信号強度 携帯の電話のアンテナ表示のようなもの
送信機/プロポ側 の信号を受信機/ドローン側 で受け取った際の電波強度を表します
ドローンにおいては OSD機能があるVTXでフィードバックしてスクリーンに表示できるので必ず設定しておきます
RTF/Ready to Fly
機体とプロポがバインドされたセット商品で 開封後すぐに飛行させる事が可能
RTH/Return to Home
機体にトラブルがあった際に自動でホームポイントに自動帰還する機能
DJI製品に搭載されており
送信機との通信が途絶えた
バッテリー残量が低下したとき
専用ボタンを押した時
に自動帰還する
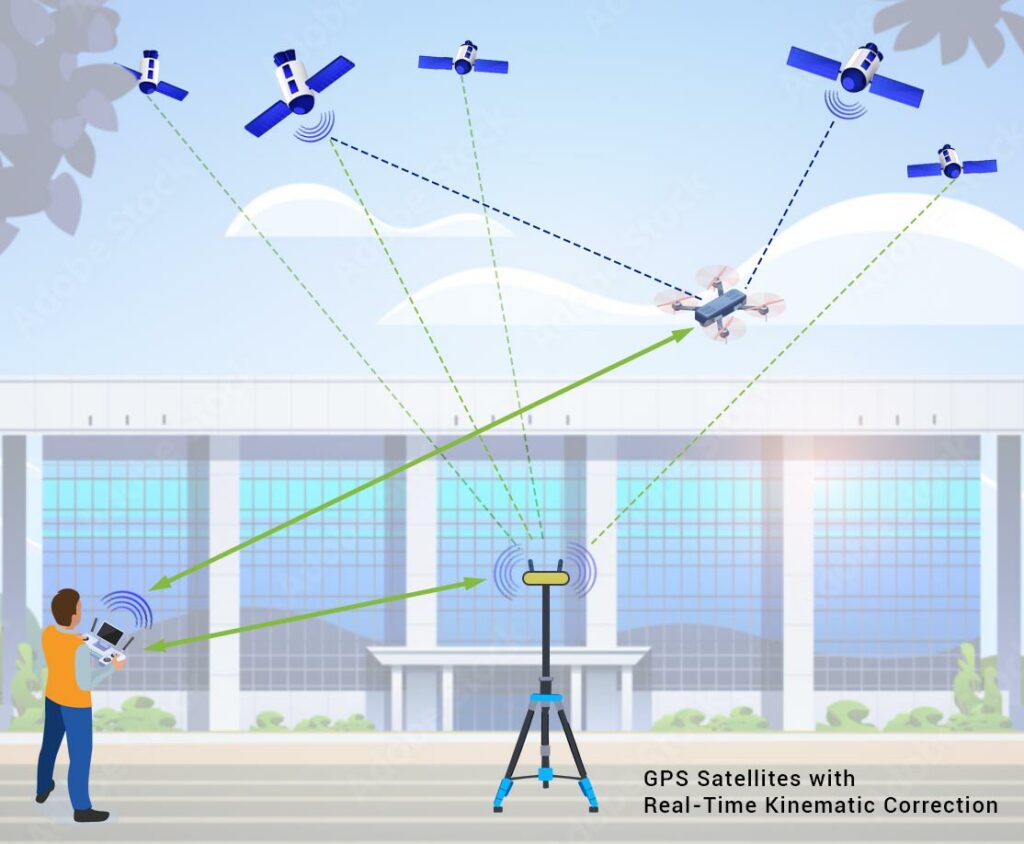
Real-Time Kinematic Positioning/RTK

リアルタイムキネマティック/RTK は 既存の衛星測位システム/GNSS から得られた位置情報に加え 地上に設けた独自の基準局の補正位置情報を加味し 位置情報の精度を上げる技術
日本では全国1,300箇所の電子基準点があり ソフトバンクによる独自基準点も3,300箇所設けられているため諸外国の様に利用者が独自に基準を設ける必要が無い
位置情報量に加え 信号搬送波の位相積算値データを使用し リアルタイム で補正することによってセンチメートル単位での位置情報が提供される
このシステムは搬送波位相強化/Carrier-phase enhancement から CPGPSとも称され リアルタイムキネマティック GPS/ネットワーク型 RTK/RTK-GNSS とも表記される
この測定技術は主に測量で用いられており 測位精度が高いため無人航空機や農業用自動運転車などにも応用が進んでいる

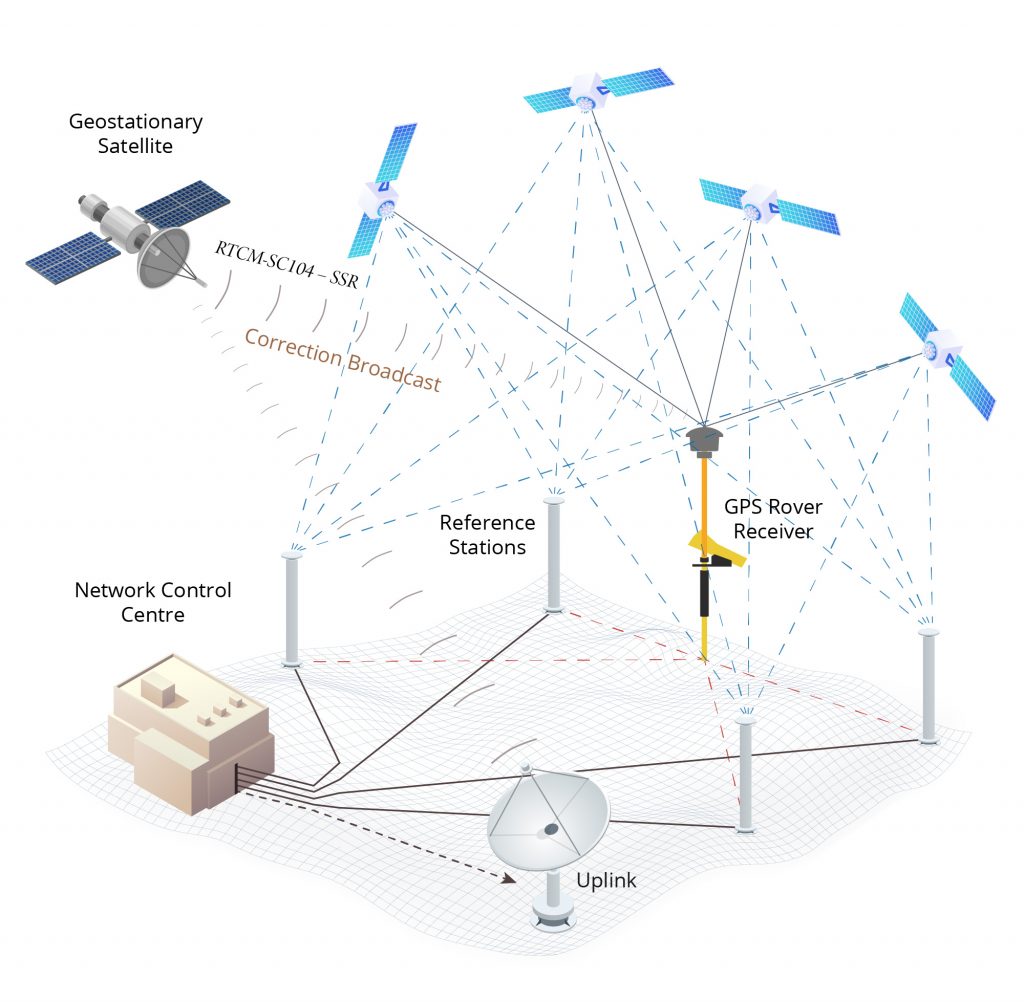
セットアップ中の基地局/基準点
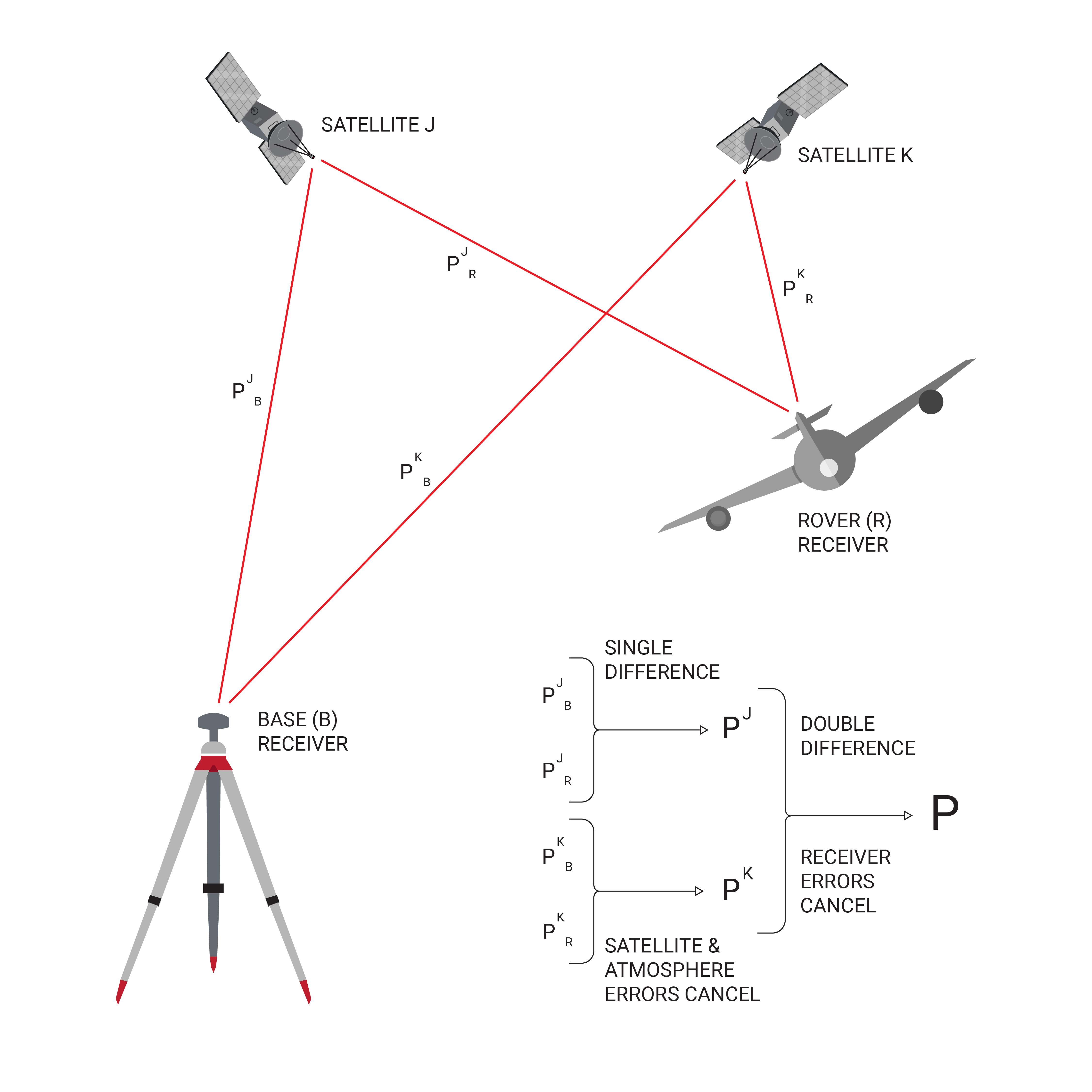
実際のRTKシステムでは 1台の固定基地局と複数の移動局が使用される
基地局が観測した搬送波の位相を再送信し 移動局が自身の位相測定値と固定基地局から受信した位相積算値を比較する
固定局から移動局への補正信号の送信方法にはいくつかあり リアルタイムで低コストな信号伝送を実現する最も一般的な方法としては UHF帯周波数のモデムを使用する方法である
このことから 大半の国では特定の周波数がRTK用に割り振られている
大半の陸上測量機器には 標準オプションとしてUHF帯の無線モデムが内蔵されている
RTKは 基地局から約20kmまでの範囲内で精度を向上させることが可能である
このため 相対位置はミリメートル単位まで計算できるが 絶対位置の精度は 基地局の計算位置と同じ精度にとどまる
一般的な公称精度は 水平方向に1センチメートル±2ppm/垂直方向に2センチメートル±2ppmである
その他の計測方法
連続観測基準点/Continuously Operating Reference Station/CORS ネットワークは 通常インターネット接続を介し 補正情報を送信する種類のRTK基地局のネットワークとなる
CORSでは 複数の局が正しい位置を示すことで 単一基地局の誤った初期化を防ぐことに繋がるため CORSネットワークでは精度が向上する
仮想基準点ネットワーク/Virtual Reference Network/VRN でも同様に 基地局を使用せず精度を高めることが可能
Real-time kinematic positioning (RTK) is the application of surveying to correct for common errors in current satellite navigation (GNSS) systems. It uses measurements of the phase of the signal's carrier wave in addition to the information content of the signal and relies on a single reference station or interpolated virtual station to provide real-time corrections, providing up to centimetre-level accuracy (see DGPS). With reference to GPS in particular, the system is commonly referred to as carrier-phase enhancement, or CPGPS. It has applications in land surveying, hydrographic surveying, and in unmanned aerial vehicle navigation.
Background
The distance between a satellite navigation receiver and a satellite can be calculated from the time it takes for a signal to travel from the satellite to the receiver. To calculate the delay, the receiver must align a pseudorandom binary sequence contained in the signal to an internally generated pseudorandom binary sequence. Since the satellite signal takes time to reach the receiver, the satellite's sequence is delayed in relation to the receiver's sequence. By increasingly delaying the receiver's sequence, the two sequences are eventually aligned.
The accuracy of the resulting range measurement is essentially a function of the ability of the receiver's electronics to accurately process signals from the satellite, and additional error sources such as non-mitigated ionospheric and tropospheric delays, multipath, satellite clock and ephemeris errors.
Carrier-Phase Tracking
RTK follows the same general concept, but uses the satellite signal's carrier wave as its signal, ignoring the information contained within. RTK uses a fixed base station and a rover to reduce the rover's position error. The base station transmits correction data to the rover.
As described in the previous section, the range to a satellite is essentially calculated by multiplying the carrier wavelength times the number of whole cycles between the satellite and the rover and adding the phase difference. Determining the number of cycles is non-trivial, since signals may be shifted in phase by one or more cycles. This results in an error equal to the error in the estimated number of cycles times the wavelength, which is 19 cm for the L1 signal. Solving this so-called integer ambiguity search problem results in centimeter precision. The error can be reduced with sophisticated statistical methods that compare the measurements from the C/A signals and by comparing the resulting ranges between multiple satellites.
The improvement possible using this technique is potentially very high if one continues to assume a 1% accuracy in locking. For instance, in the case of GPS, the coarse-acquisition (C/A) code, which is broadcast in the L1 signal, changes phase at 1.023 MHz, but the L1 carrier itself is 1575.42 MHz, which changes phase over a thousand times more often. A ±1% error in L1 carrier-phase measurement thus corresponds to a ±1.9 mm error in baseline estimation.
Practical Considerations
In practice, RTK systems use a single base-station receiver and a number of mobile units. The base station re-broadcasts the phase of the carrier that it observes, and the mobile units compare their own phase measurements with the one received from the base station. There are several ways to transmit a correction signal from base station to mobile station. The most popular way to achieve real-time, low-cost signal transmission is to use a radio modem, typically in the UHF Band. In most countries, certain frequencies are allocated specifically for RTK purposes. Most land-survey equipment has a built-in UHF-band radio modem as a standard option. RTK provides accuracy enhancements up to about 20 km from the base station.
This allows the units to calculate their relative position to within millimeters, although their absolute position is accurate only to the same accuracy as the computed position of the base station. For RTK with a single base station, accuracy of 8mm + 1ppm (parts per million / 1mm per km) horizontal and 15mm + 1ppm vertical relative to the base station can be achieved, depending on the device.[7] For example, with a base station 16 km (slightly less than 10 miles) away, relative horizontal error would be 8mm + 16mm = 24mm (slightly less than an inch).
Although these parameters limit the usefulness of the RTK technique for general navigation, the technique is perfectly suited to roles like surveying. In this case, the base station is located at a known surveyed location, often a benchmark, and the mobile units can then produce a highly accurate map by taking fixes relative to that point. RTK has also found uses in autodrive/autopilot systems, precision farming, machine control systems and similar roles.
Network RTK extend the use of RTK to a larger area containing a network of reference stations. Operational reliability and accuracy depend on the density and capabilities of the reference-station network. With network RTK, accuracy of 8mm + 0.5ppm horizontal and 15mm + 0.5 ppm vertical relative to the nearest station can be achieved, depending on the device. For example, with a base station 16 km (slightly less than 10 miles) away, relative horizontal error would be 8mm + 8mm = 16mm (roughly 5/8 of an inch).
A Continuously Operating Reference Station (CORS) network is a network of RTK base stations that broadcast corrections, usually over an Internet connection. Accuracy is increased in a CORS network, because more than one station helps ensure correct positioning and guards against a false initialization of a single base station.
A Virtual Reference Network (VRN) can similarly enhance precision without using a base station,[10] using virtual reference stations (VRS), instead. The concept can help to satisfy this requirement using a network of reference stations. A typical CORS setup consists of a single reference station from which the raw data (or corrections) are sent to the rover receiver (i.e., the user). The user then forms the carrier phase differences (or corrects their raw data) and performs the data processing using the differential corrections. In contrast, GNSS network architectures often make use of multiple reference stations. This approach allows a more precise modeling of distance-dependent systematic errors principally caused by ionospheric and tropospheric refractions, and satellite orbit errors. More specifically, a GNSS network decreases the dependence of the error budget on the distance of nearest antenna.