テクニカルターム/専門用語は
特別な活動やグループの技術用語 または特徴的な慣用句です
ジャンル内で特定の意味を持たせ/定義した用語で
これによりコミュニケーションの効率性や精度を 高めることができます
Technical Terms of Drone
テクニカルターム
Aa
Accelerometer
加速度センサ
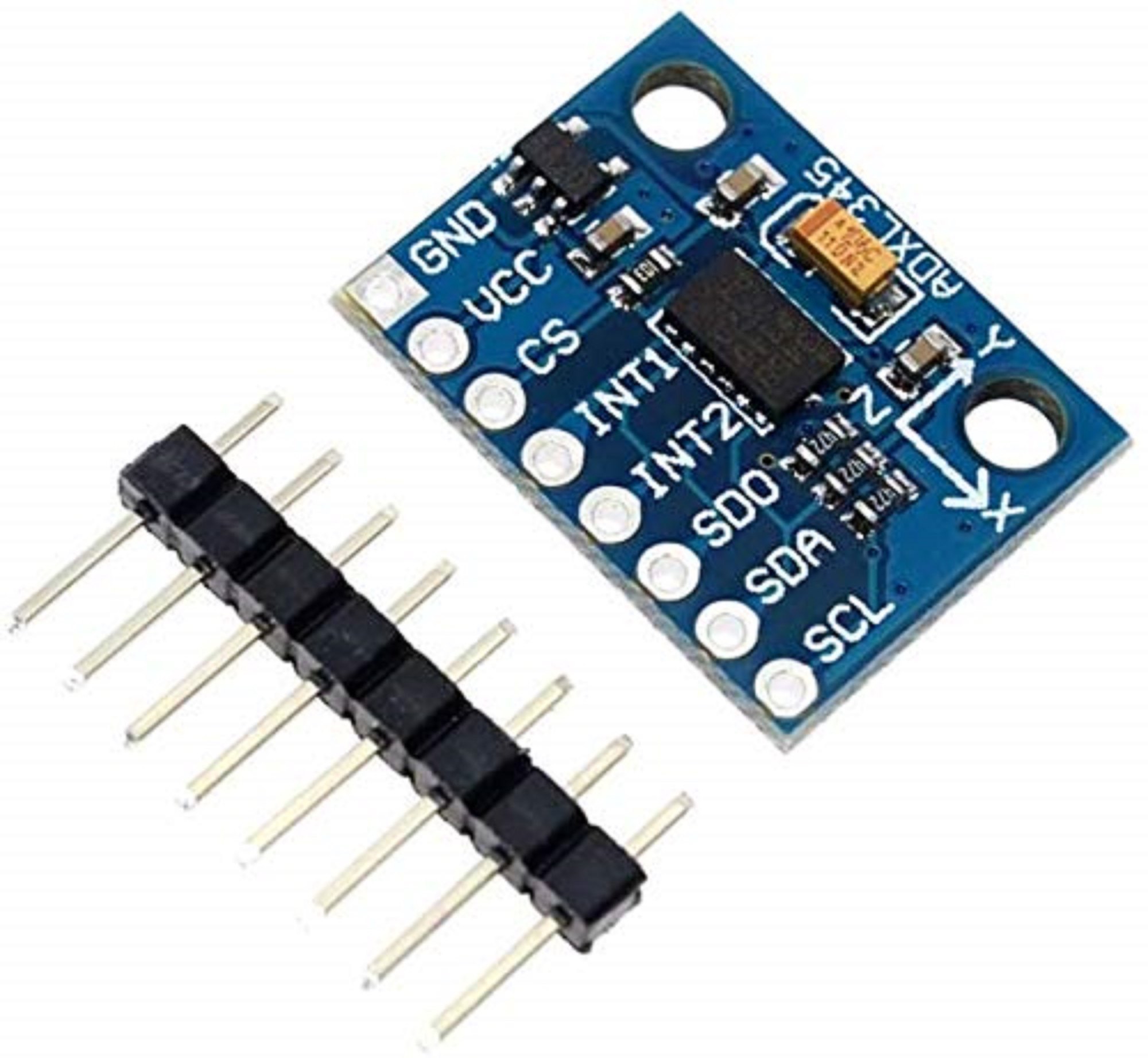
加速度計 は 物体の加速度を計測する機器である
加速度センサとも呼ばれる
小型の加速度計/加速度センサ はMEMS技術を用いて作製される
MEMSの加速度センサの場合 質量が小さいため感度は低下するが劇的な小型化が可能になるため
自動車のエアバッグやカーナビゲーションの傾斜計/ゲームのコントローラ などに使われている
精度は測定軸を基準に仕様されるため 軸の方向を筐体の固定面/およびその加工精度
で確定しないと加速度センサが提唱する精度に意味がなくなり
特にプリント基板上に加速度センサが実装されただけの状態では計測用途に適用し難い
Acro Mode
ジャイロによる水平姿勢制御がOFFの状態
傾き制限がなくなるため フリースタイルはもちろんの事
レース上位入賞者もこちらのモードを使用しています
動画撮影においても アングルモードの姿勢制御が働きガクつく映像よりも綺麗な映像が撮れる
操作においては高度な技術が必要
停止や水平に戻すのもマニュアル操作が必要となり 進行方向の逆にステッィクを入れてカウンターを当てる必要がある
Acro mode uses the RC sticks to control the angular velocity of the copter in each axis.
Release the sticks and the vehicle will maintain its current attitude and will not return to level (attitude hold).
Acro mode is useful for aerobatics such as flips or rolls, or FPV when smooth and fast control is desired.
Raising the INS_GYRO_FILTER cutoff frequency and retuning may allow better responsiveness, but appropriate harmonic notch filtering to prevent noise impacts must be setup prior to retuning.
See Managing Gyro Noise with the Dynamic Harmonic Notch Filters for more information.
Pure rate mode stabilization, utilizing only the gyros with no attitude feedback from the accelerometers, can be forced by setting bit 1 of ACRO_OPTIONS to one.
Attitude will still have an open loop correction applied in this mode, similar to “heading hold” tail gyros, but attitude can drift over time.
The throttle is completely manual with no compensation for tilt angle of the vehicle.
If the pilot puts the throttle completely down the motors will go to their minimum rate and stabilization will cease.
However, this behavior can be changed by enabling AirMode
Copter includes an Acro Trainer functionality that can be turned on/off to make learning to fly Acro easier.
Stick inputs are interpreted in the “body frame” (as opposed to Sport mode in which they are “earth frame”).
The difference between “body frame” and “earth frame” is most obvious when the vehicle is leaned over.
For example when pitched forward at 45 degrees, when left yaw is applied if using an earth frame controller (i.e. Sport mode) the copter will maintain its pitch and roll angles as its heading changes.
With a body frame controller like Acro it will rotate about the vehicle’s vertical axis meaning the pitch angle will become the roll angle and the roll angle will become the pitch angle.
AFHDS3
Quadrotor/Quadcopter/Multicoptor/ドローンに使われている通信プロトコル
AFHDS3/Third Gen Automatic Frequency Hopping Digital System is Shenzhen Flysky Technology Co.,Ltd. newest and most advanced patented digital wireless protocol.
AFHDS 3 combines the best of our AFHDS 2A and WS2A protocols, allowing for bidirectional real-time data packet transmission and lossless data stream transmission.
In combination with our new 2.4GHz RF chip AFHDS 3 allows for a level of flexibility and adaptability never seen before, including dynamically setting and balancing the number of RF transmission channels, channel resolution, range, anti-interference requirements and latency in order to match the best use case for each customer.
Ah/Ampere-Hour
アンペア時 は 電荷の単位
安定した1アンペア(A)の電流を1時間流すことで移動する電荷の量と定義され 3600クーロン/C に等しい
単位名に含まれる「時」を英語のままにし アンペアアワーと呼ぶこともある
アンペア時は 電気メッキや電池の容量などの電気化学に関連した測定において多用される単位である
電池を構成する材料の比容量/質量あたりの容量 は 通常 mA·h/g で表される
ミリアンペア時/mAh/mA·h の形で使われることが多いが これは1000分の1アンペア時 3.6クーロン/C に等しい
ミリアンペア秒/mA·s は
X線撮影/画像診断/放射線療法 において使われる単位である
この量は 特定の電圧で操作される所定のX線管で発生される全X線エネルギーに比例する
X線管の電流に従い加える時間を変えることで 同じ線量にすることができる
ファラデー定数は 1モルの電子が持つ電荷と定義され 約26.8アンペア時に等しい
ファラデー定数は電子化学の計算に用いられる
アンペア時は ジュール/J や ワット時/W·h のようなエネルギーの単位でない
一般的に/二次電池の場合は完全充電後に 電池がどれぐらい持続するかを表す評価である
例えば電池では 供給されるエネルギーの正確な計算には
電池の電荷が全て放電される間に供給される電力/瞬間的な電圧と瞬間的な電流の積 を積分する必要がある
通常 電池の電圧は一定ではなく放電中に変化する
平均電圧や公称電圧は 電力の積分に近い値が用いられる
Air Mode
スロットルオフでもプロペラが回る
スロットルオフでもプロペラが回ることで フリースタイル撮影時のブレが減り映像が安定するようになる
This is not an actual flight mode, but rather, an important feature of ACRO and STABILIZE mode.
Other flight control software refer to it as a flight mode, so for consistency, its included in the Copter flight modes documentation.
Normally, in Copter, if arming is setup via the rudder stick, if throttle is lowered to idle in ACRO mode, the stabilization is removed.
While this prevents movement due to vibration while on the ground at idle throttle, it prevents stabilization in flight for aerobatic movements or rapid descents.
If a transmitter switch is used with RCx_OPTION ARM/DISARM with Airmode (option 154) and used to arm, then stabilization at idle throttle is still fully active, which is often referred to as AIRMODE.
Angle Mode
ジャイロによる水平姿勢制御がONの状態
安全性が高い飛行モードで着陸も安定していますが 機体の傾きの制限ががあるため 一定以上の速度が出ません
傾きが制限されるため 風にも流されやすくなります
トイドローンなどでは Angleモード固定の場合があります
ANT
Quadrotor/Quadcopter/Multicoptor/ドローンに使われている通信プロトコル
ANT/automatic frequency hopping digital system, developed by Flysky in 2020 with accumulating more than ten years of valuable development experiences, is a new system based on AFHDS 2A upgraded hardware platform using a new generation of highly integrated 2.4G chip.
Through the RF advanced mode function, it is set with the number of RF transmission channels, resolution of each channel, distance, anti-interference, and transmission delay.
With simple operations, the RF radio control system is created to meet user different demands.
Arm/Arming
モーターの始動
反対に モーターを切るときは Disarm/ディスアーム と言う